机器学习和自动驾驶,清华大学和美国伊利诺伊香槟分校联合培养博士。曾任特斯拉机器学习团队带头人,带队研发了Autopilot 2.0核心模块和FSD芯片上机器学习软件;前小鹏汽车自动驾驶VP,带领XPilot研发,主导设计了小鹏P7自动驾驶系统架构。
撰文:谷俊丽 | 策划:胡静文 |校版:徐鸿鹄
几个月之前我在知乎上写过一篇自动驾驶的文章,《自动驾驶,系统架构功能演进,P7案例分析》,简单介绍了目前大热的乘用车辅助驾驶ADAS的架构设计要素和新上市的小鹏P7的案例分析,此后收到了很多行业的交流讨论,受益颇多。
毫无疑问,ADAS现在处在一个"去噪"之后的产品落地点。我们处在一个百年不遇的时代变革机遇潮流中,即将出现惊心动魄的行业格局重组。
接下来的五年,将会是乘用车辅助驾驶功能ADAS装载率逐步演进到100%的黄金增长期——这意味着巨大的市场和技术产业链的蓬勃发展。
按照2019年年初发布的《车联网(智能网联汽车)产业发展行动计划》中提出的指标,2020年新车驾驶辅助系统(ADAS)搭载率将超过30%,接下来预计市场渗透率每年增长30%,在2024-2025年,全球生产的全部8000万辆新车上面都将搭载ADAS。国内调研数据还显示,2020年,我国新车市场ADAS的市场规模将达到878亿元,全球三分之一的市场在。
软件定义汽车是未来。究其根本,科技创新是驱动。原本低频迭代的汽车产品,正在催生出来一个高频迭代的技术生态,让汽车走向摩尔定律时代。一旦实现了千万量级别的搭载规模,ADAS系统的形态肯定是异常丰富的、异构的,就像现在的PC电脑或者智能手机的、造价、受众和上下游生态一样,将会是一个全新的市场格局,并孕育出崭新的商业机会。
拥有世界上庞大的中等收入,这是特斯拉进入的原因之一。过去十几年的互联网繁荣爆发得益于的人口红利,ADAS在生态和成本上要更胜于互联网产品时代,我们的中等收入能否托起智能车的繁荣昌盛?他们是否愿意为自动驾驶产品功能掏出真金白银?能否突破消费者针对软件的心理惯式?目前行业依然处于早期,有待在发展中验证。
2020年也是Tesla这只大鲶鱼在大翻腾的开始,Autopilot软硬件经过7年积累,完成从0到1,形成了超硬的技术力和高毛利,所有车辆出厂默认自带硬件系统,软件用户按需订阅,高配收费高达8000美金。特斯拉的成功,激发很多公司一跃而起,奋起直追,让整个行业处在一个从1到N的热闹竞争景象。接下来的几年又是ADAS本土化的窗口,拭目以待所有玩家一起来探索和验证在的多样化产品体验和商业模式。
本文我抛砖引玉,分享一些自己对于ADAS系统未来十年的预测、三级功能分层及对应打法、四代ADAS架构的提炼总结和展望,以及除了技术之外的一点其他观察和思考,希望得到大家交流指正。
自动驾驶硬件系统预测
ADAS系统是“软件定义汽车”这一概念促生的产物,快速崛起并带来了全新的汽车技术和商业价值。2020年,ADAS系统所代表的软件定义汽车这一趋势已经毫无争议地被看作是汽车的未来,而这一年,也毫无争议地被看作自动驾驶元年。
目前的ADAS市场还由国际上的主流Tier1主导,80%的市场由以色列的Mobileye占据,其他由博世、大陆等占据。“割韭菜”的除了这些传统一级供应商之外,还有特斯拉。
玩家还很少,这就意味着:ADAS系统现在还是卖方市场甚是垄断市场。
基于Tier1的解决方案在量产规模逐步提升上来之后在逐步降价,但是基于开放式平台自主研发的复杂系统依然很昂贵,比如基于英伟达Xavier的计算平台高达1000美金以上,不包括软件功能,特斯拉Autopilot高配售给消费者的是8千美金,即5万多人民币,这大概是一台特斯拉车售价的10%甚更高,也就是说特斯拉车辆的一半利润来自Autopilot软件,这在车辆产品属性上是一个历史性转折。
以往豪华车辆的奢侈之处大多为外型、内饰、汽车电子、轮毂等决定,现在ADAS犹如一匹黑马,成为了车辆几万个零部件中占比的部件。
ADAS系统作为新型奢侈昂贵部件,它的出现给汽车市场的布局带来一定的震荡,在新车设计的时候不得不考虑ADAS系统的BOM成本,以及跟车辆的终销售是否匹配。
在昂贵的现状下,商业的打法似乎分成了两个阵营:
传统汽车厂商的配置主导的理念:不同配置的硬件系统不同,消费者在购买时就要决定中高低配置,比如低配不包括ADAS系统,高配智能化强。于如何配置,则要根据产品定位的受众承受能力来综合考虑。但是一旦新车配置选定,则将终生不变。
特斯拉的硬件预埋理念:所有车辆在出厂时都具备ADAS硬件能力,用户软件订阅然后通过OTA空中升级享受五福,这种模式更加接近电脑或者智能手机,可以灵活地APP装载卸载和订阅功能。
必然,卖家市场不会一直存在下去,随着竞争的加剧和技术的成熟,未来系统形态和空间都将向着普及的方向发展。在此,我们感兴趣的问题是:ADAS系统的走势将如何变化呢?
我的前老板兼导师Jim Keller曾预测说:未来的ADAS系统就犹如现在的GPS一样,完全普及,50美金一个。
我去查了一下GPS的发展历史,20年前的2001年,个人终端GPS开始出现,造价高达3000美金,后来逐步降到10年前的几百美金,到如今,普遍的几百美金的智能硬件(手机、手表、AR头盔等)里面都具备GPS功能,估算手机里面一个集中式的GPS也就不过一美金左右吧。
从这个故事可以发现,GPS设备的每十年降低一个数量级——这是一个很有历史借鉴意义的观察,我相信ADAS系统整体大趋势会追随相似的趋势,但是以其系统复杂度和高技术含量,在上会不会高一个量级?
如果终的稳定在50美金左右,会不会意味着整个行业商业前景的暗淡呢?
依据近期跟行业交流和核心部件调研,我初步对智能驾驶系统的未来十年的走势做了如下预测供大家参考:

未来十年L2-L4智能驾驶系统解决方案预估
仅前向视觉的L2:仅前向视觉的L2级系统(1R1V)目前为250美金以上,主要的技术形态是国际tier1垄断提供,比如Mobileye,前期利润空间很高,预测会逐步成熟降价,以降维打击其他玩家,2025年120美金,2030年100美金。
三目摄像头的L2+:比如三目摄像头ADAS(1R3V)和环视解决方案,要比L2贵50%左右,比如2020年350美金,2025年降200美金,2030年降150美金。
高端的L2++(L3):目前的解决方案为大家号称的L3级系统(5R8V),我称之为L2++,360度无死角感知覆盖,加上高性能AI计算芯片,有些奢侈还采用了Lidar,目前3000-4000美金,十年后,摄像头、毫米波雷达、激光雷达、计算平台均会降价,2025年降1500-2400美金,2030年降1000-1500美金。
的L4:非常粗略的估计,目前一套系统大概5万美金以上,主要是高端的Lidar和计算平台,未来5-10年传感系统以每年降价30%的步伐,初步估计整套L4系统2025年大概降1-3万美金,2030年降1万美金以下。
未来几年L2和L2+会成为标配,硬件系统会随着技术成熟降到100-150美金左右,Jim Keller的预测应该是主要针对这部分,不适合L2++高端系统,L2++的将会高一个量级。目前的趋势比较明显,高低智能会发展为两种。下文会提供一个未来十年的高低配功能的演进和市场渗透率预测。
横向比较,未来ADAS的主要利润空间将是高端ADAS平台,为了实现科技感的用户体验,未来的十年内都会采用科技前沿的一些部件,技术深耕会持续演进。在这个过程中,传感系统将更加廉价,高端芯片也会去垄断化降价——比如降价50%。但是受AI算法的"Computing hungry"(算力饥饿)特性驱动,性能会一直提升,会稳定在一个区间。有点类似于在PC时代,高端CPU和高端显卡将占据主流——性能提升但是不会降低。
终,一个成熟ADAS系统的分布差不多1/2左右在传感系统、1/3左右在计算,其余在定位和其它系统,于成本高昂的交互技术则另算。
这个预测当然只是一个粗浅的类比计算,与系统定价相比,当前更为核心的问题在于,消费者真的愿意为ADAS功能掏出真金白银么?又愿意出多少?
关于这个问题的答案,目前还不是很明确,对于ADAS系统的收费方式,特斯拉也一直在变化。
比如,近特斯拉的功能配置定价策略是如下两档定义的:
大众层 (增强辅助驾驶):3000美金,这个涵盖了已经日趋成熟的Autopilot 1.0和2.0的主要功能,比如ACC+LCC,能够达到高速上直线行走或者根据用户指示来换道。
精英层(智能,全自动驾驶):如果跟大众层打包一起卖就是7000美金,如果在大众层的基础上后续再追加5000美金,整体就是8000美金。这个包含了NOA、自主换道、车辆召唤等更一些的智能。
我还很清楚的记得2016下半年团队刚把Autopilot2.0自研成功,很快要推送上车,Elon在开小会时提到给Autopilot的定价是大众层5000美金,全自动驾驶两者打包一起购买是7000美金,如果后续购买就需要追加3000美金,所以分开购买的总是8000美金。
他并没有解释他的定价逻辑,但是Elon是一个同时具备技术理解和商业天赋的天才,我想他肯定极端相信特斯拉车辆带给用户的极端科技体验,和特斯拉积累的技术护城河一时无人超越。不过有意思的是,近期特斯拉把大众层和精英层的定价给颠倒过来了,大众层降价为3000美金,全自动驾驶抬价为5000美金,甚在一些高端车辆里面,大众层变成了标配,用户只为全自动驾驶一次性付费7000美金。
我感觉这里面蕴含特斯拉割韭菜的逻辑,低配便宜一点,增加割韭菜的面积,才能大范围盈利,定价也比较符合消费者客观情况。
对于特斯拉这种豪华且技术来说,前期的受众一般都是不差钱的精英层,七八千美金的一次性购买图个体验图个好玩,压力也不大。但是对于其他技术力还不是很强,或者还处于早期的产品来说可能就是一个挑战。
再以国内量产L3,即广汽Aion ADiGO (艾迪)为例,其完整版智驾套装的为3.98万人民币。作为国内的对比,小鹏P7 Xpilot 3.0随新车购买为2万元,后续升级为3.6万元,蔚来NIO Pilot完整版的为3.9万人民币,特斯拉Autopilot标准版选装是2.78万人民币,全自动驾驶配置4.63万人民币,理想ONE则选择了全系标配的策略。
36Kr的李勤近就点评说:“特斯拉以高研发投入打造智能化,智能化支撑高毛利,然后大量出货摊薄研发费用,进而实现企业盈利的模式已经跑通“。
的确,特斯拉在高起点的基础上,已经开始推进智能的按月收费模式了,我相信更多样化的收费模式会在2020年展开,但一切应该以用户方便为出发点,将促进ADAS系统的普及和鼓励广大消费者主动尝试新技术。
但是ADAS收费模式对于其他来说,目前还不是完全清晰,更多的无法获得溢价,也就是维持BOM成本保本的水平。 未来ADAS的盈利模式将会如何进化?配置主导或者硬件预埋会如何演变?两者继续分化还是汇聚归一?
展望未来,在摩尔定律的掌控下,商业打法是否会随产品的下探和普及发生变化呢?这些都是有趣的问题,需要进一步的观察和思考。
智能化分层和功能演进预测
开发自动驾驶的初目的是有其社会意义的,加速人类进化,解放人类的时间,让出行变得更加安全,更加便利。因此,自动驾驶要去概念化,去名词化, 从而远离不切实际的无效讨论。
按照对用户的体验角度,我将智能功能依照演化顺序分为三个层次,由低级别到别的演进层次分别为:
安全帽层
孩童层(L2级)
智能层(L2+和L2++)
通常来说,这种分层化的思考应该是自动驾驶的产品经历需要考虑的。但在这里,我仅抛砖引玉,通过结构化思考提出自己的版本,并希望得到更多的产品经理的认同和支持,甚能够再接再厉,将其推向更完善和丰富的境界。特别是,发挥在互联网产品领域的想象力和对消费者需求炉火纯青的掌握,在自动驾驶这个新领域上,设计并延伸出百花齐放的功能和体验。
更具体地说,它们是:
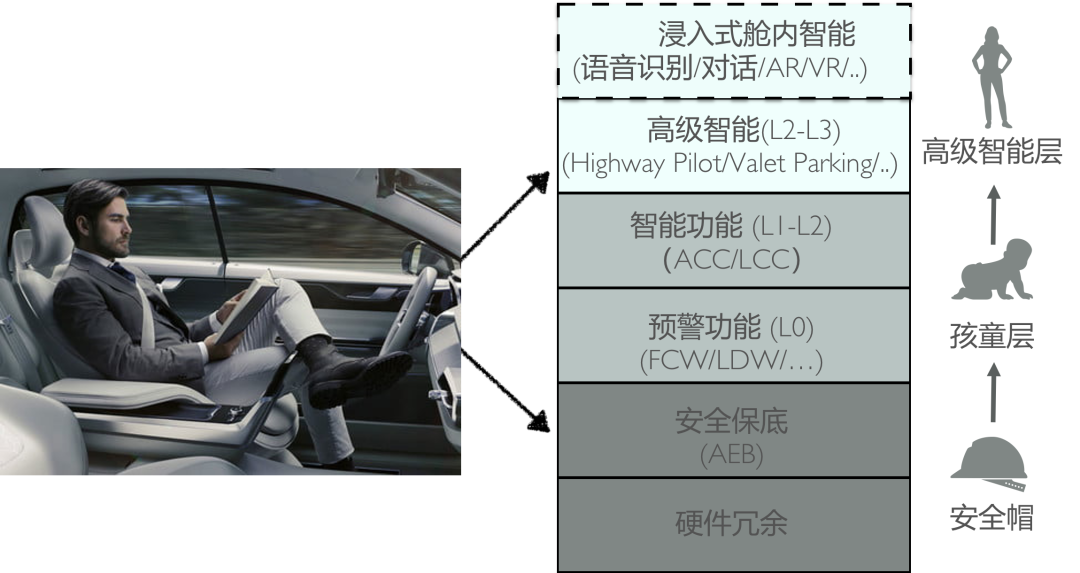
去概念化智能功能分层
安全帽层:保证车辆和驾驶员性命安全的保底,也可以称为防火墙层,目前主要指紧急刹车制动(AEB)和核心硬件部件的冗余备份。
孩童层:包括L0-L2级辅助驾驶,智能化功能逐步演进上来,主要包括高速公路上的直线行走,比如目前常见的自动跟车调整速度的自适应巡航(ACC)、车道居中保持功能(LCC)和Autopilot的AutoSteer功能(ACC+LCC同时工作)。L0级各种预警功能——之所以叫0级辅助驾驶,是因为这里仅预警给用户提醒,并不一定控制车辆,除非带有一定的纠偏功能。目前预警功能已经相对成熟了,用户体感不强。
智能层:L2-L3级智能和浸入式舱内智能。L2-L3智能,通过技术的升级演进让车辆能够再更长的时间和更加完整的路段自主驾驶,比如根据地图上下匝道就成了Highway Pilot,近期比较吸引眼球的功能是Valet Parking(代客泊车) 和Smart Summon(智能召唤)功能。这个层次驾驶体验更加科幻和智能,乘客通过语音直接跟车辆交互,无需按钮,同时人类解放出来的关注力可以开始产生一些其他的附加商业价值,比如舱内购物、AR、VR、游戏等。
关于第三点,目前的定义还比较模糊。我是这样理解的:车辆作为一个独特的封闭空间,将消费者浸入包围到整个智能体验之中,我称之为浸入式舱内智能。
我个人很看好的一个智能是将车辆所看到的虚拟世界提炼出来,即将机器视觉和环境结合起来,展示给用户,提供像电影黑客帝国那样真真假假世界之间穿梭的感觉。智能层代表了技术前沿,根据架构设计,我又将其分为L2+和L2++两个子阶段,L2++也可以理解为L3。
理论上的L3是很难实现的,但理论定义不关键,L3究其本质,是驾驶体验的演进。2020年有几家车企会逐步推出类L3系统,2021-2022年更有国际大厂Volvo和BMW会推出L3甚L4产品。我们在后文中会介绍,借助于车路协同新基建,有望L3系统重定义和繁荣。
值得一提的是,安全帽层,孩童层,智能层这三个层次相互依赖,也都可以看作是独立富有产品生命力的有机体,随着时间的推进,它们会将按照特有的步调向市场逐步渗透。以下是我不负责任的畅想环节,给出了分层的智能化演化时间表:

2010-2030年智能驾驶功能演进周期和市场渗透率预测
2010-2022年,以AEB为主打的主动安全功能渗透到100%。按照法规和认证要求新车必须装载AEB。由于自研风险很大,AEB经验丰富的依然是主流Tier1。
2014-2025年,以ACC、LCC和Autosteer为主打的高速公路辅助驾驶功能渗透到100%,这个阶段的实现路径也会出现少数特斯拉似的自主研发,随着Tier1解决方案的不断规模化和成熟降价,大部分车企打法还可以采用集成Tier1的解决方案,或者采用部分Tier1(通常感知系统)部分自研(规划控制和功能集成)的组合拳 。
2019-2030年,以特斯拉NOA(Navigate on Autopilot)和Smart Summon为前锋,引开了L2-L3级智能的演进序幕,智能作为顶端高配和少数走自研路径的车企拥有的黑科技,有很多发挥和想象的空间。同步以互联网基因为锚点引爆了浸入式舱内智能的蓬勃发展,比如语音交互和对话功能、哨兵模式、游戏和卡拉OK等。高端系统不能像L2和L2+一样做到普及,格局也许就像高端智能手机一样,渗透到30%-40%的市场,其中苹果手机利润高达60%。以目前来看,特斯拉就是汽车界的苹果,软硬一体垂直打通,Autopilot系统利润率高达大几倍,整车利润高达30%。特斯拉只有一家,还有很多家都想成为特斯拉,包括车企和Tier1,采用全栈式自研,即自己搭硬件系统、自己研发软件的后手重拳。自主研发路径路漫漫其修远兮,除了研发费用和人才竞争之外,也是对公司基因、体系、组织和基因的拷打验证。
超脱现实的第三点引起了我们的极大兴趣,值得大谈特谈一番:
ADAS和舱内智能是两个相对独立的不同的技术形态。特斯拉的思路是先难后易,先把Autopilot功能做到了特定的稳定阶段,近期才逐步推出了一些花哨的舱内智能。从2020年开始,舱内智能将会是一个爆发的繁荣景象——互联网思维全球,舱内智能将会是一个取巧的发力点,曲线救国带来用户的一些智能体验。更关键地,智能会促进多个领域的核心技术模块不断创新演进,在车这个载体上发展演进。智能依托极度智能体验会获取高额软件利润,比如芯片、智能交互等产品都是攫取利润的杀手锏。
ADAS的本质驱动在于技术,在技术的本土化上还有很长的路要走,比如目前我们在核心根基之芯片和操作系统层面还有很多课要补。希望在未来的五年内自主技术产业链能够随着商业的扩展而得到深耕和成长,这也意味着行业面临着纵向和横向发展的双重挑战。
再引申一步,ADAS的本土化也会是一个真命题,接下来的几年也是功能本土化的一个窗口。ADAS的本土化是对研发能力的验证,中医有话“通则不痛“,唯有从数据到算法彻底打通,才能解决痛点。
组合拳相对保险,可以部分算法本土化,比较快地出一些效果。但是做不到整套系统白盒化、差异化和彻底OTA。
后手重拳的全栈自研需要少3-5年的内功修炼,研发费用巨大,人才壁垒高,不过一旦修炼成功,就达成了类似于特斯拉式的技术护城河和任性洒脱的软件OTA升级,以及带给用户差异化的智能体验。此外,还可以在商业角度掌握话语权,获取高利润空间,同时把自己打造成一个承载技术供应链和服务生态演进繁荣的平台。
但关于舱内智能的演化,仍然还有很多不确定性——这里有个互相依赖的关系,即浸入式舱内智能是否一定要建立在智能的基础上?
个人看法:对于驾驶员来讲,自动驾驶达到一定的自主水平,舱内智能才有被安全使用的基础并拓展出新的应用。当然,如果面向车内其他乘客的话,舱内智能可以不严格依赖于自动驾驶水平。
也有部分OEM思考是否ADAS采用Tier1的方案,舱内智能作为商业服务来运作?个人感觉这也许是一个短期有效,长期话语权有限、也不好差异化的选择问题。
ADAS架构设计的进化阶梯
前面谈到的产品的商业化推广渗透和产品的功能演进渗透,目的是让大家去概念化。当然,的赢家一定是实干者,能够在具体技术实现路径上进行深度耕耘。这就是本节要讨论的内容:技术供应和生态系统方面的思考。
毕竟ADAS是一个复杂的技术系统,要理解其中的核心矛盾本质,才能讲的清楚其演进趋势。做高度抽象的话,ADAS系统主要分解为三个核心能力:
看得清(感知)
算得动(算力)
行得准(控制)
按照这个基本逻辑再往下讲ADAS架构的核心部件解析,分解剥洋葱,内部结构就会呈现,按照功能top-down分层为:

剥洋葱:ADAS系统架构和层次化分解
1.智能功能
2.传感能力(摄像头、雷达、超声波)
3.定位系统(IMU、GPS、轮速计、RTK、地图)
4.芯片算力
5.安全保底(紧急刹车AEB、驾驶员状态检测)
6.冗余(制动、转向、计算和传感单元的冗余)
继续,如果以上top-down分解可以看作是放大镜下的视角,进一步,我们还可以搬出显微镜,对系统架构实现方式进行更加具体的细分。但在这里我们却遇到了难题:站在不同的视角,甚不同时期,你就会发现,系统的架构实现方式过于庞杂,远远超过上面剥洋葱的比喻。
然而,虽然架构五花八门,但总有一些进化的脉络存在。近期,我对行业主流架构进行了大量观察,并通过与诸多的交流,就找到这样一条相对清晰的架构进化树,不同代技术之间,显现出了量化的差异性。

四代ADAS系统架构和核心部件演进图
代L2架构。其特点是:
主推ACC、LCC、AutoSteer功能
技术架构上采用前向感知系统
通常包括1个百万像素左右的摄像头、1个前向毫米波雷达、12个超声波雷达可以做自动泊车和盲区检测
算力平台在几百GOPS和1TOPS之间
米级定位系统(常规IMU、导航GPS、导航地图)
安全保底采用紧急刹车AEB;有刹车冗余。
典型案例:
Autopilot 1.0
第二代L2+架构。其特点是:
主推ACC、LCC、AutoSteer功能,增强盲区检测、主动变道甚红绿灯检测功能
系统架构在感知和算力上做升级,比如在1.0的基础上升级感知系统为增强前向感知
主流架构包括一个三目前向摄像头(比如30度左右窄视角、50度左右中视角、180左右度宽视角),三目摄像头是由Mobileye引入的视觉系统设计,在原来单目摄像头的基础上增加了一个远距离窄视角的摄像头用于长距离目标追踪和交通标志及地面障碍物的提前标识。同时还增加了一个近距离宽视角的摄像头用于探测周围的行人和汽车人。不仅通过不同视角给出更广泛的环境图像信息以做到多车道检测和十字路口信息检测等
1-5个毫米波雷达,有些只采用前向雷达,有些产品同时采用4个角雷达,12个超声波雷达
算力同步提升为1-20 TOPS
定位定位硬件系统不变,精度米级,导航地图升级到ADAS地图
安全层面可以考虑增加环视4个摄像头做到360环视
典型案例:
基于EyeQ3感知,< 1TOPS算力的系统:
Autopilot 1.0
Volvo Pilot Assist 3.0 (分离出去的Zenuity)
基于EyeQ4感知,2.5TOPS算力的系统:
GM Super Cruise 2.0
NIO Pilot
BMW X5
理想ONE
VW
FCA
Audi
采用博世的奔驰、上汽、长安的XPilot 2.0等系统
第三代L2++/L3架构。其特点是:
功能层面大的升级到高速自主驾驶、城市拥堵驾驶和自主泊车功能
系统架构大的升级,感知系统由前向增强感知升级为360感知
采用8个摄像头,5个毫米波雷达和12个超声波雷达,个别产品甚采用前向lidar,不管是摄像头还是毫米波都可以做到360无死角感知覆盖,实现双感知系统,感知系统之间还有一定的冗余关系,比如自动驾驶摄像头和环视摄像头互为冗余
感知的提升需要算力的同步提升到20-200 TOPS
高速自主驾驶做到主动变道需要定位系统少是亚米级定位,升级为IMU Pro、双边带GPS、RTK和HDMap。随着新基建的推行,有可能是实现RTK量产使用的。关于GPS是单边带还是双边带,不同有不同意见,我个人倾向双边带,可靠性更强。
安全层面包括AEB、360环视,增加驾驶员检测系统(DSM)来对驾驶功能做辅助,形成人+车智能闭环;冗余要求更高,增加计算和控制单元的冗余备份。
典型案例:
Autopilot hardware 2.0 (1R8V + 10 TOPS Nvidia Pascal)
Autopilot hardware 3.0(1R8V +144TOPS FSD)
XPilot 3.0(5R8V+30TOPS Nvidia Xavier)
Aion LX ADiGo(EyeQ4+ Lidar+5Radar+TI TDA4, 5R3V1L+10.5TOPS)
BMW iNext(2 EyeQ5 + 2 Intel Denverton CPU + Lidar + 4 Radar, 即5R6V1L+ 32TOPS)
Audi A8 (EyeQ3+Lidar+5 Radar+NVIDIA Tegra K1, 即5R3V1L+2TOPS)
注:上面我将浮点的FLOPS统一算为目前主流针对DNN有效的TOPS(比如将32位浮点计算能力转化为8比特整数计算算力)
第四代L4架构。其特点是:
功能层做到特定场景L3或者L4,彻底解放人类的时间,浸入式智能爆发到AR/VR的实现和其它消费类业务。
感知系统上采用更高精度的摄像头比如800万像素,同时增加Lidar,除了单车智能,增加车路协同V2X和5G
算力预测达200-2000 TOPS(2000TOPS是英伟达推出的安培架构GPU)
亚米级定位系统
安全冗余层面更加扎实,比如增加电源冗余等。这个层面的整套系统下来要达到几百瓦的功耗,很可能要采用水冷来保证系统的散热和可靠性。
典型案例:
还没有大规模量产的产品,参见各种L4-L5的无人驾驶车辆。
值得期待的有:
Volvo XC90 2022年版本,目标是高速公路全自动驾驶Highway Pilot(https://www.caranddriver.com/news/a32381082/volvo-xc90-autonomous-highway-pilot-future/)Volvo CTO Henrik Green提到,"Volvo将会为驾驶负责,人类可以解放双手,双眼也无需盯着路面。我们会通过OTA逐步扩展自动驾驶的覆盖场景和区域,这是一个逐步的过程。"
BMW iNext Ultra (3 EyeQ5 + 24-core Intel Xeon CPU + 4 Radar +7 Camera + 5 Lidar, 系统配置还配备fallback和安全帽子系统,堪称奢华阵容)BMW计划在2021年启动一个500辆规模的无人驾驶车队,目标是L4甚L5级无人驾驶,除此之外,在对外销售的乘用车上会实现L3。据说iNext整车售价高达8万美金,对标特斯拉高端model S,不知道自动驾驶系统会售价几何,很期待!
英伟达的高端计算平台专门针对无人驾驶打造,代Drive PX Pegasus, 算力高达320TOPS(8比特算力), 功耗500瓦;推出的第二代Drive AGX Orin算力高达2000TOPS(8比特算力), 功耗高达750瓦。妥妥的小型服务器穿上了汽车的外衣,就是平时大家说的电脑加轮子吧。
ADAS家族的丰富性和异构性,在此已经展现得——在ADAS的动物世界里,没有标准答案,更像是一场在成本把控和差异化之间的平衡和角逐。
在追求智能体验的驱使下,高端产品设计依然在奢侈豪华技术阵容里面带头奔跑,验证了智能车将会作为一个新型技术平台支撑起ADAS技术生态的演进。
Q&A:ADAS设计核心问题
问:Fall back理念指什么?
i.系统设计需要有一定的层级概念,按照我们的安全帽层+孩童层+智能进阶,在成本允许的情况下,不同层有不同的硬件子系统支持,才能达到安全性和可靠性化。
ii.智能建立在安全保底的基础上,智能遇到意外和故障时,降级到低级孩童智能层上,终由满足NCAP的底层系统作为安全保底层。
iii.出炉的BMW iNext系统设计提供了很好的设计案例。

BMW iNext的L3系统的智能分级和fallback冗余机制
问:如何理解可伸缩的系统架构?
i.整车设计通常讲究中高低配置,不同配置的、功能不同,ADAS作为其中的一个关键功能模块,大部分整车项目还是要求有中高低配置之分,这就要求ADAS架构设计有可伸缩的能力:自动驾驶系统的算力、传感器数等可适当“减配”。
ii.华为在他们的架构设计中运用了此概念,并由高端开始设计,可删减为低端系统。
问:如何选择摄像头参数?
i.Bayer模式,RCCC低光度好,但是色彩不够,红绿灯看不见;RCCB在低光和色彩中是个平衡;RGGB,低光度差。不同的摄像头根据功能需求采用合适的Bayer模式。
ii.像素,分前向和侧向不同,目前的业界主流前向在由100万进化到200万,未来两年像素依然会增加。根据功能需求来计算自己的系统需要的像素,比如需要看200米,根据AI算法每个物体少需要20*20个像素的经验值,换算出来所需像素。从实用的角度200万像素对于L2+和L2++足够了。RoboTaxi也许会采用更高分辨率,比如800万像素,这些高端摄像头可以灵活配置以满足全场景的识别需要,比如用像素换取更高性特殊光照下的成像性能。
iii.长宽比,16:9 和4:3是常见配置,理论上根据自己不同系统之间的一致性来合适,比如上代采用了16:9,后代依然延续。这样大数据能够延续,上一代积累下一代需要的粮食,保证研发需求和大数据正向积累。
问:双目视觉感知系统怎么样?
双目指通过两个摄像头一起工作,在感知系统上增加检测距离信息的目的,通常日本斯巴鲁和德系奔驰喜欢双目系统。近几年由于以Mobileye为首的供应商采用了三目一体的感知解决方案,获得了比双目更加丰富的环境信息;再加上以特斯拉为代表的采用AI算法通过刷海量数据(21.480, -0.28,-1.29%)达到了很好的效果,感觉双目已经慢慢成为小众方向了。
问:要不要采用Lidar?
i.Lidar我并不是,我的理解为:目前任何一个单一传感器都有局限,基于视觉的感知方案可能在有些场景的三维信息计算上会有些不完善,采用Lidar能够在视觉+毫米波雷达的基础上,将感知的信息精度和三维信息进一步提升,比如由2σ(97.73%)提升到3σ(99.87%)。所以高端奢侈会通过增加Lidar用成本场景覆盖率换取安全提升。
ii.宝马架构师Simon Fürst提到:"iNext主要依靠激光雷达估算道路曲率,激光雷达制作的地图也可以提供曲率,也有助于定位"。
iii.广汽智能驾驶部长郭继舜提到:"采用Lidar增强功能安全级别,传感器的异构冗余,克服毫米波雷达对金属目标虚警的天然劣势"。
iv.Volvo XC90正在调研让Lidar作为标配来促进ADAS的功能演进。
结语
撼动传统行业的新型科技都有一个共同特点:产品推出以后,一项或多项生产工作的成本降到几乎为零。一旦事物的发展落入"零原则"的范畴,那这项技术必将大概率商业化。汽车公司偏爱这种思路——其主要原因,就是硬件优势很大,该方案可以延长他们对方向盘的掌控时间——即汽车行业的主导权。
但这一原则被特斯拉Autopilot给打破了,Autopilot给汽车带来了的软件属性和可生长的智能体验,同步也带来了接近一半的整车利润。
智能驾驶是人工智能触碰实体经济的一个影响的案例,人工智能和大数据的汇入,将汽车变成了一个具备增值空间的信息技术平台和新型服务入口,软件属性前景一片辉煌。
这个变革本质上将人类过往半个世纪的计算机、互联网、交互等技术进步都要浓缩到汽车这个新的载体上,打造一个崭新的技术创新生态。重要的是让原本低频迭代的汽车产品,变成一个高频迭代的技术平台,蕴含了巨大的商机。变革深远,多维跨界、技术壁垒高、高端人才需求集中,需要十年磨一剑的勇气和决心。
变革成功的汽车公司未来将是一个科技公司、大数据公司、软件公司、出行服务公司,赢得未来的闪亮入场券。
所以我们看到了特斯拉硬件预埋的商业逻辑:从0到1打造一个未来信息平台和服务生态,形成技术护城河、快速创新的闭环和商业垄断。从特斯拉Autopilot到Robotaxi,RoboTruck,都是这一路线的产物,成为一个个活生生的汽车涅槃案例。
跟Elon共同经营Paypal的Peter Thiel在《从0到1》这本书里面提到:
垄断生意是一个健康的存在,只有在早期形成壁垒的创业公司才能潜下心纵向深耕,推进技术的真正进步。
特斯拉用十年完成了从0到1,现在大家纷纷入场,希望完成从1到N,推动智能电车的普及。在这个新的赛道上,技术创新是本质,各个车企选择什么突破口、什么打法、用多少投入和时间、如何形成自己的差异化、真正输出什么价值,是启程前需要思考的核心问题。
ADAS本身是复杂系统工程,且从1到N的过程中面临大量竞争,已经占据先机者可能还会降维打击,这条路要走通并不容易。
正如同凯文·凯利所说:
技术,是人的"第二肌肤",一直是,将来也是。
每一个技术预言家都是梦想家,他们研究汽车,走进ADAS科学,是想知道技术的本质是什么,未来长成什么样。
写在
本文抛砖引玉,希望引发大家的共同思考,并深入进行行业交流。在此感谢朋友徐鸿鹄和胡静文对我写这篇文章的建议和支持,静文写了一首藏头诗,我觉得很适合用来映衬当前行业内群雄涿鹿的格局:
《智驾元年 之 华山论剑》
江河湖海潮,山峦峰岭逍,
若站华山巅,定要沧海笑。
祝所有ADAS的同仁们都能在智驾的科技大舞台上施展抱负,大展宏图。

